豊田工大Release
【学生受賞】博士後期課程2年 武次広夢さんがIEEE名古屋支部「国際会議研究発表賞」を受賞
2026.05.14
IEEE名古屋支部「国際会議研究発表賞」を受賞
- 受賞者
豊田工業大学 大学院工学研究科 博士後期課程 情報援用工学専攻 2年 武次広夢さん(知能情報メディア研究室)
- 学会名
IEEE名古屋支部
- 受賞名
国際会議研究発表賞
- 発表タイトル
Physical Plausibility-aware Trajectory Prediction via Locomotion Embodiment
- 受賞日
2026年4月13日
賞の概要
2025年4月1日から2026年3月31日までの間に開催されたIEEE主催の国際会議において行われた学生による発表のうち、優れた国際会議発表を行った 12 名の学生が、本年度の受賞者として選出された。

研究概要
自動運転車やロボットなど、現実世界で自律的に行動するフィジカルAIに注目が集まっています。今後、人と同じ空間で安全に振る舞うフィジカルAIを実現するためには、人の動きを適切に理解・予測できる技術が必要不可欠です。そのために本研究では、人の過去数秒間にわたる観測をもとに、将来軌跡を予測する問題に取り組みました。
これまでにも人軌跡予測手法は数多く提案されてきましたが、それらは人の動きを2次元の点の軌跡としてしか扱わず、「人の歩行動作として物理的に妥当でない軌跡を予測してしまう」という課題があります。自動運転車やロボットにとって、このような妥当でない予測をもとに行動を決定することはリスクとなります。
そこで本研究では、図1のようなヒューマノイドの物理シミュレーションを活用し、予測された軌跡が過去の全身姿勢に続く人の歩行動作としてどれだけ物理的に妥当であるかを評価する手法を提案しました。提案手法により得られるスコアは、軌跡予測器の学習時に予測軌跡の物理的妥当性を高める目的で使用できるだけでなく、他の任意の軌跡予測器と組み合わせて、実行時に物理的妥当性の低い軌跡を除外するフィルタリングにも活用できます。実験では、提案手法を活用した学習によって最新の軌跡予測手法の性能をさらに高められることや、フィルタリングによって誤差の小さい軌跡を保持しつつ、誤差の大きい軌跡を適切に除外できることを確認しました。
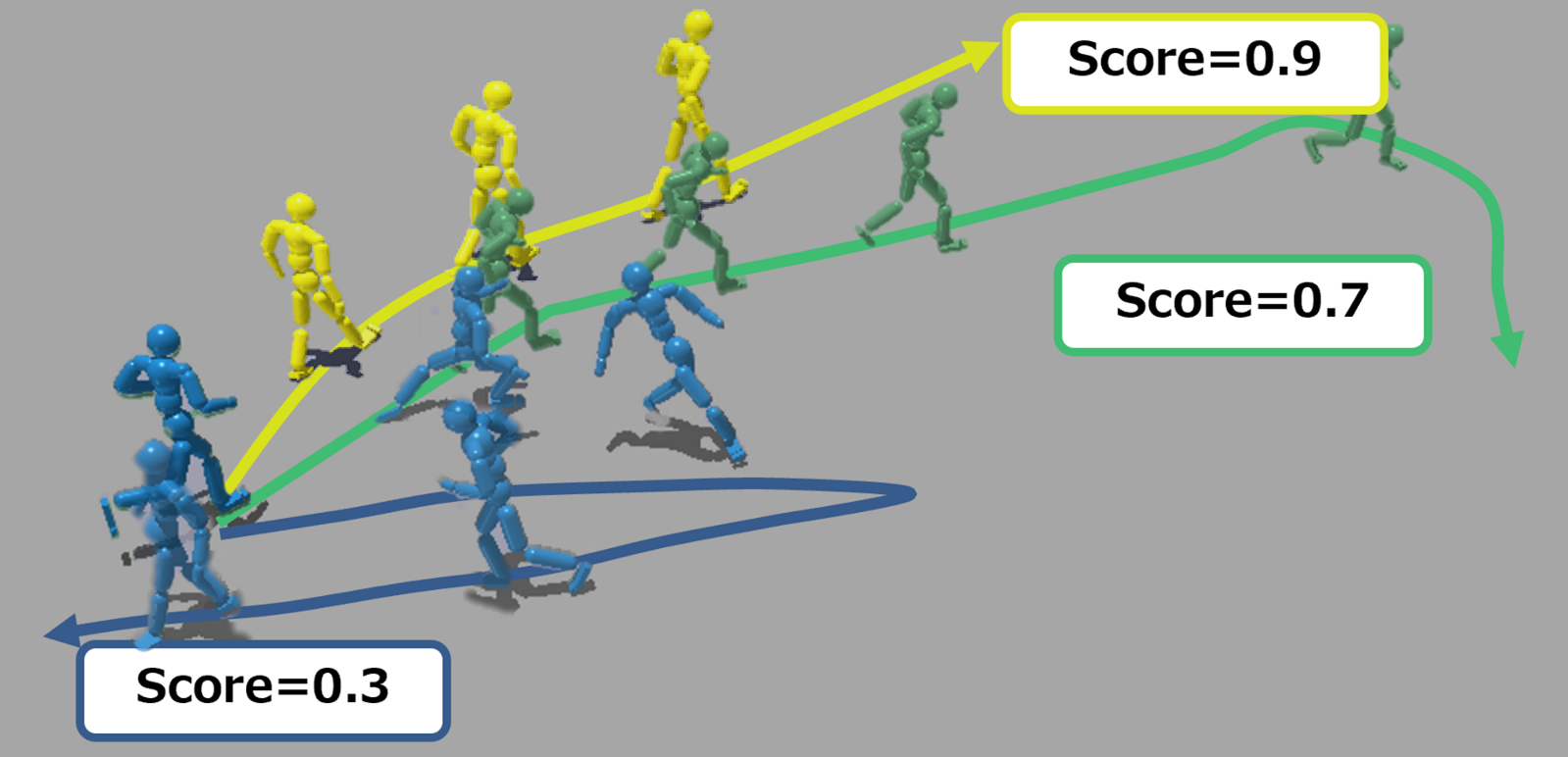
図1. 提案手法の概要。過去の全身姿勢に続く歩行動作としての予測軌跡の物理的妥当性を評価する
受賞コメント
AI・コンピュータビジョン分野で世界最高峰に位置付けられるCVPRでの発表をこのように高く評価していただき、大変光栄です。浮田先生や共同研究者の延原先生(京都工芸繊維大)、共著者として数多くのアドバイスをくださった大羽剛瑠さん、前田孝泰さんに感謝申し上げます。本研究はTTIC協定留学においてRIPL (Robot Intelligence through Perception Lab) に滞在する中で着想したもので、関連分野であるロボティクスの知見を積極的に取り入れたことが新規な成果の創出に繋がったと考えています。よりインパクトのある研究を目指して、今後も研鑽を積んでまいります。
謝辞:本研究の国際会議発表にあたり、情報科学国際交流財団による研究者海外派遣助成を受けました。